
Inertial navigation systems (INS) use a combination of accelerometers and angular rate sensors (gyroscopes) to detect altitude, location, and motion. They may also be capable of detecting attitude, position, velocity, temperature, or magnetic fields.
Inertial navigation relies on knowing the initial position, velocity, and attitude in order to measure attitude rates and acceleration. The operation of inertial navigation systems depends upon Newton’s laws of classical mechanics. It is the only form of navigation that does not rely on external references.
Applications:
- Mobile robots
- Transportation vehicles: ships; aircraft;
- Military: submarines; aircraft; guided missiles; spacecraft
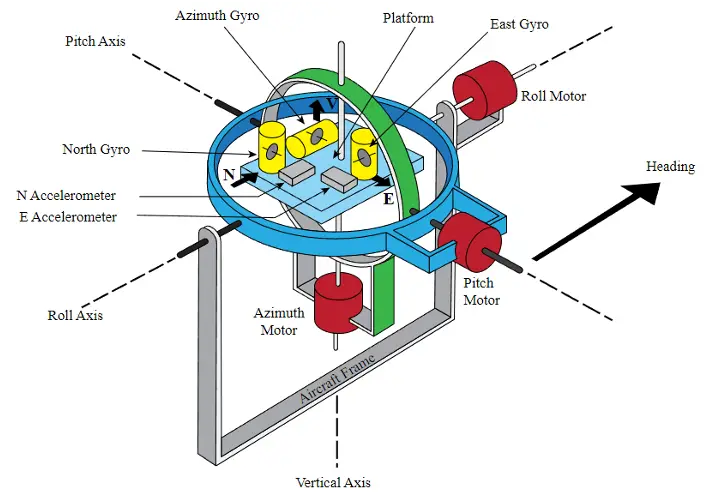
Main components:
- Accelerometers (motion sensor)
- Rotation sensors (gyroscope)
- Magnetic sensors (magnetometer)
- Barometric altimeter